
作者: 深圳市日弘忠信实业有限责任公司发表时间:2023-03-31 14:08:53浏览量:340【小中大】
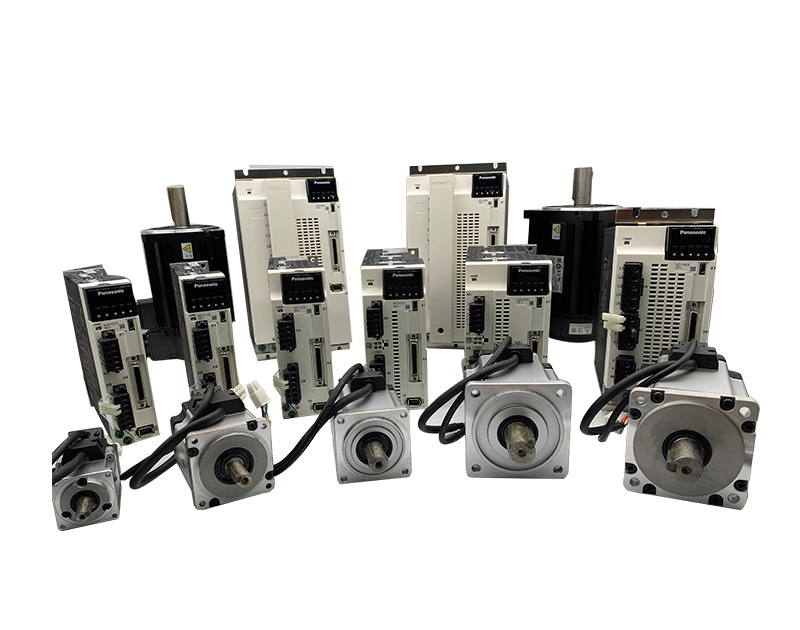
松下伺服电机代理—日弘忠信今天给大家讲讲伺服电机有哪些基本特性?伺服电机的定义与特性。随着工业自动化水平越来越高,伺服电机在工业现场应用也越来越广泛。本文从伺服电机基础知识出发,介绍了伺服电机的构成。

伺服电机的设计构成
定子设计:
1、SM系列伺服采用了分瓣实铁芯结构设计,超高槽满率,降低发热,提高输出功率2、定子采用铝机壳、真空环氧灌封设计,最大限度提高了电机的散热能力3、真空环氧灌封设计,提高了电机的绝缘能力,并有效的保护电机绕组,使得电机能够适应恶劣的应用环境转子设计:
1、高磁能级磁钢有效提高电机输出转矩2、分段错位磁钢结构,有效减少齿槽转矩,使电机运转平稳,易于速度控制和精确定位3、转子平衡块使得电机高速运转更平稳
抱闸设计:
抱闸是机器人电机的基本选项。近乎95%以上的伺服电机需要抱闸,要确保时刻抱闸,尤其在紧急停车时可靠运行,抱闸需要有足够的安全系数,静扭矩大约在电机额定扭矩的1.5倍左右,重载型机器人电机抱闸的安全系数要达到2.0甚至2.5倍。有一点需要注意的是,机器人电机的抱闸是安全制动器,不是刹车制动器,控制上要确保在急停状态下通过制动电阻让伺服驱动器的刹车电路工作,电机转速接近0的时候抱闸动作。为了提高抱闸的响应速度,永磁抱闸优于电磁弹簧抱闸。
编码器设计:
编码器安装于电机尾端,是属于电机速度和转子位置传感器。可以测量转子的位置用于伺服控制磁场定位和转子实际位置和速度给控制电脑,用于运动轨迹计算。机器人电机编码器一般精度不高,但需要多圈绝对位置可测量,保证断电之后,再次运行,断电前面的位置可以记忆。目前流行三种方式解决机器人电机编码器的问题。第一种方式是单圈采用格雷码光电或磁码盘,多圈采用机械齿轮。这样的好处是测量精度高,断电后约会通过编码器的机械位置记住电机的运行位置,上电后直接读取即可,但缺点是编码器太厚,在有限的安装空间下就显得过分长。第二种是单圈信心通过光电或磁编格雷码记忆,多圈通过电池供电电子记忆,这样就可以把编码器做得很短,对外方小于60mm的小伺服电机非常适合。缺点是电池的使用寿命比较短,长则2-3年,有的1年就要更换电池。第三种方式是精度要求不高的场合才使用的旋转变压器测量单圈位置,多圈信息通过在控制箱里的带电池电路板完成。
关于伺服电机由哪些设计构成?伺服电机的设计构成的知识点,想要了解更多的,可关注松下伺服电机官网,如有需要了解松下PLC、松下传感器、松下伺服电机、松下伺服马达的相关技术知识,欢迎留言获取!

扫描二维码关注官方微信公众号














 粤公网安备 44030602003136号
粤公网安备 44030602003136号